Yash Vardhan Pant
Assistant Professor, Electrical and Computer Engineering, University of Waterloo.

E5, U. Waterloo
Waterloo, Canada
I joined the University of Waterloo in 2021, where I lead the Control, Learning and Logic (CL2) group. My research interests lie in using elements of Control Theory, Formal Methods, Machine Learning and Optimization to solve problems in Safe Autonomy of Robotic and other Cyber-Physical Systems. [Curriculum Vitae]
Prior to joining the University of Waterloo, I was a Postdoctoral Fellow in the EECS Department at UC Berkeley. As a part of the VeHICaL project, I was mentored by Professors Sanjit Seshia (primarily) and Bjoern Hartmann.
I received my PhD in Electrical Engineering from the University of Pennsylvania, where I worked on developing Robust Predictive Methods for Planning and Control of Autonomous Systems as a part of Prof. Rahul Mangharam’s Real-Time and Embedded Systems Lab.
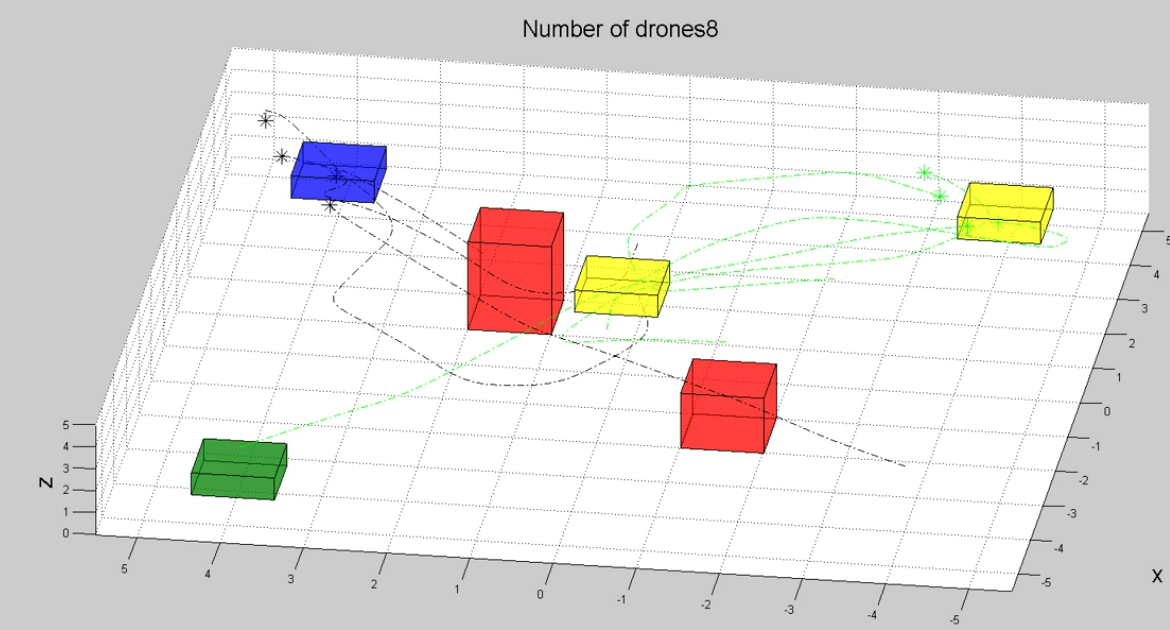
Computationally tractable solutions, that potentially solve real problems, are a recurring theme across my research. More often that not, the algorithms we develop are implemented on actual Cyber-Physical Systems, some of which are: multiple Crazyflie 2.0 quad-rotors, a 1/10th scale autonomous car, a hex-rotor platform, a hardware-in-the-loop vehicle ECU simulator, a scaled down hybrid powertrain for Electric Vehicles, and a self-balancing, fully enclosed electric motorcycle.
news
| Sep 15, 2022 | I’m serving as the publicity chair for the IEEE/ACM International Conference on Cyber Physical Systems (ICCPS), hence it is my duty to use this space to invite y’all to submit your papers to ICCPS. You won’t regret it. |
|---|---|
| Sep 1, 2022 | Glad to welcome Leroy, Zhao Feng and Soroush to the CL2-group! |
| Aug 1, 2022 | Missed a few publication-related updates, but check out our two papers at this year’s ITSC! |
| Jun 15, 2021 | Our paper on a Signal Temporal Logic-based framework for safety of Autonomous UAVs in Urban Air Mobility missions has been accepted for publication in the Transportation Research Part C: Emerging Technologies, special issue on Embracing Urban Air Mobility. |
| Apr 29, 2021 | Our paper on decentralized path planning with line-of-sight constrained communication between agents, led by Victoria Tuck, has been accepted at the IEEE Conference on Control Technology and Applications (CCTA), 2021. |