research
Also see the publications page
Learning-to-Fly (L2F): Learning-based mission-aware Collision Avoidance
In order for fleets of drones managed by different operators to share an airspace, they require a fast, reliable and fair Collision Avoidance (CA) approach to ensure safety. This project aims to develop such methods by combining learning-based decision making and decentralized Model Predictive Control to perform on-the-fly, predictive Collision Avoidance (CA) between two (co-operative) drones. In addition to performing CA in real-time, L2F also ensures that the drones do not violate their original mission requirements. The video below shows a simulation where two pairs of drones are have conflicting pre-planned trajectories, and also shows the resulting safe trajectories obtained via L2F.
Related Publications:
- Rodionova, Pant, Jang, Abbas, Mangharam. Mission-aware, Learning-to-Fly: Learning-based Collision Avoidance for Scalable Urban Air Mobility. IEEE International Conference on Intelligent Transportation Systems (ITSC), 2020.
- Jang, Pant, Rodionova, Mangharam. Learning-to-Fly RL: Reinforcement Learning-based Collision Avoidance for Scalable Urban Air Mobility. AIAA/IEEE Digital Avionics Systems Conference (DASC), 2020.
Fly-by-Logic: Safe-planning for Drone Fleets
Safe planning and control of multi-rotor drone fleets performing complex missions has been a challenging problem. Methods that offer guarantees on safety and mission satisfaction generally do not scale well. On the other hand, more computationally tractable approaches do not offer any safety guarantees. This project develops methods that overcomes these limitations for a wide variety of missions, e.g. the video below shows a mission where 2 pairs of drones are tasked with patrolling two regions within predefined time intervals, and while avoiding a no-fly zone and collisions with each other.
Related Publications:
- Pant, Quaye, Abbas, Varre, Mangharam. Fly-by-Logic: A Tool for Unmanned Aircraft System Fleet Planning using Temporal Logic, NASA FM, 2019.
- Pant, Abbas, Quaye, Mangharam. Fly-by-Logic: Control of Multi-Drone Fleets with Temporal Logic Objectives, ICCPS, 2018.
- Pant, Abbas, Mangharam. Smooth Operator, Smooth Operator: Control using the Smooth Robustness of Temporal Logic, CCTA, 2017.
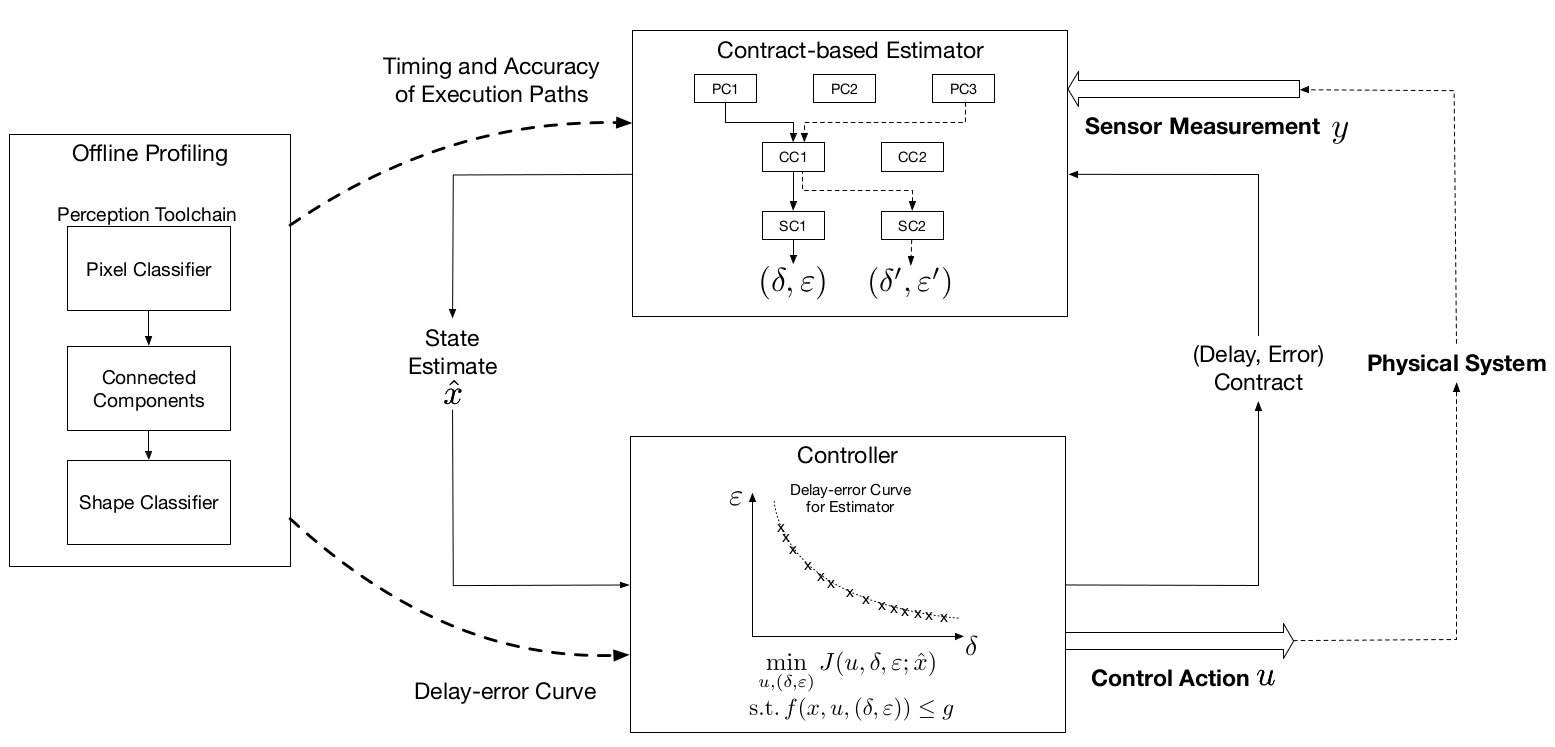
Co-design of Anytime Computation and Control for Autonomous Systems
Perception-based state estimation for autonomous system is generally a computationally expensive process, both in terms of execution time and energy consumption on the computation platform. This work develops a contract-driven framework for closed-loop interplay between: a) a predictive control algorithm and b) a flexible anytime perception-based state estimator to trade-off computation time (and energy) for estimation accuracy while guaranteeing robust (or chance-constrained) constraint satisfaction of the autonomous system. Experimental results show the benefit of this framework over approaches that do not leverage this co-design.
Related Publications:
- Pant, Abbas, Mohta, Quaye, Nghiem, Devietti, Mangharam. Anytime Computation and Control for Autonomous Systems, IEEE Transactions on Control Systems Technology, 2020.
- Pant, Abbas, Mangharam. Robust Model Predictive Control for Non-Linear Systems with Input and State Constraints via Feedback Linearization, CDC, 2016.
- Pant, Abbas, Mohta, Nghiem, Devietti, Mangharam. Co-design of Anytime Computation and Robust Control, RTSS, 2015.
- Pant, Abbas, Nischal, Kelkar, Kumar, Devietti, Mangharam Power-efficient Algorithms for Autonomous Navigation, ICCSE, 2015.
Protodrive: Peak Power Reduction for Hybrid Energy Storage Systems with Limited Load Forecasts
Related Publications:
- Pant, Nghiem, Mangharam. Peak Power Reduction in Hybrid Energy Systems with Limited Load Forecasts, ACC, 2014.
- Price, Jain, Pant, Mangharam. Final Report: Protodrive: Simulation of Electric Vehicle Powertrains, World Embedded Software Competition (third place finish), 2013.
AutoPlug: Hardware-in-the-loop Electronic Controller Unit Testing
Related Publications:
- Drolia, Wang, Pant, Mangharam. Autoplug: An automotive test-bed for electronic controller unit testing and verification, ITSC, 2011.